Arseni Aliakseichyk
Embedded and Infrastructure Engineer
GlobalLogic Robot - IoT Robotic Platform
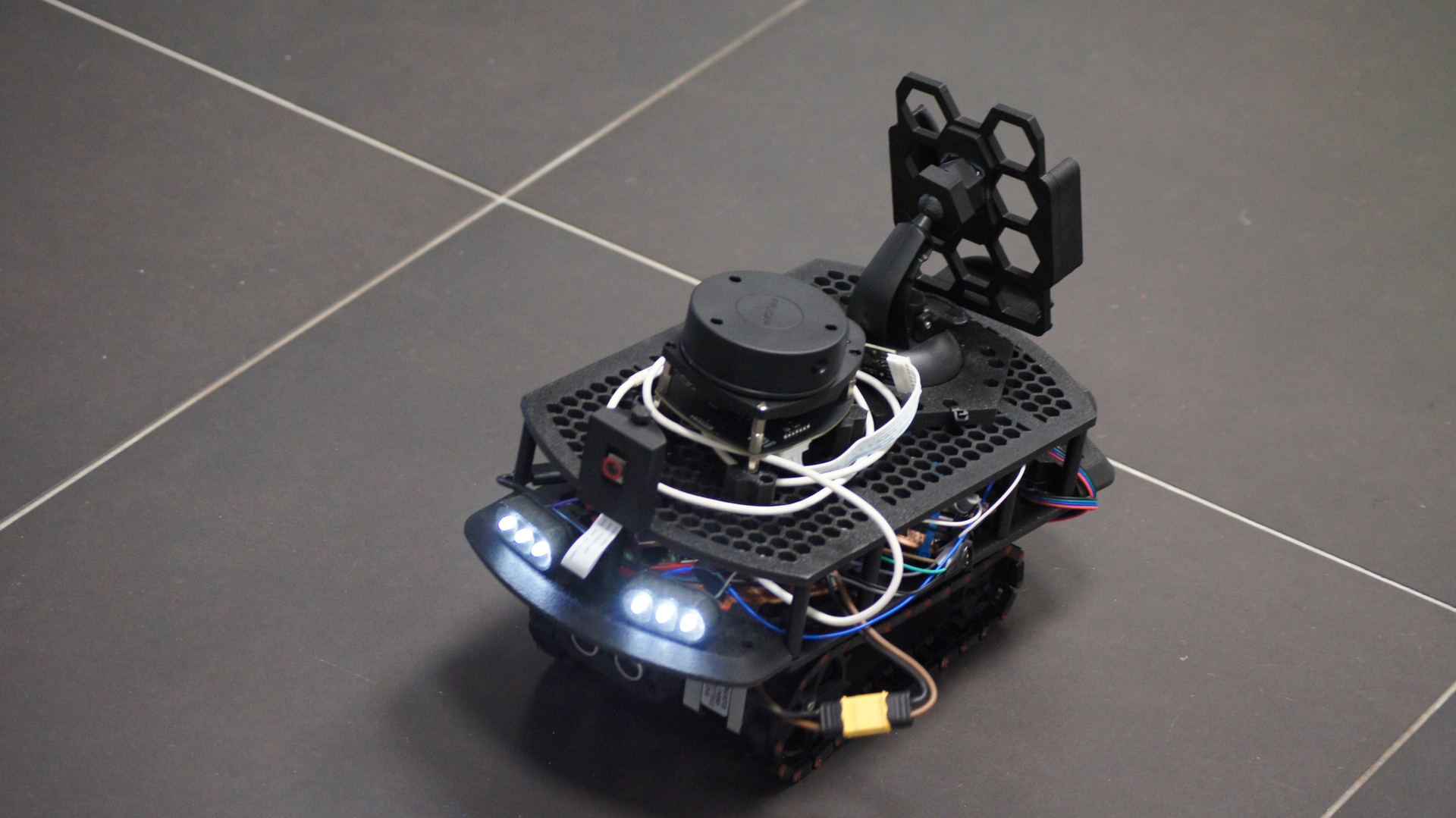
Modular Robotic Platform on Raspberry Pi 5
GlobalLogic Poland • Jun – Oct 2025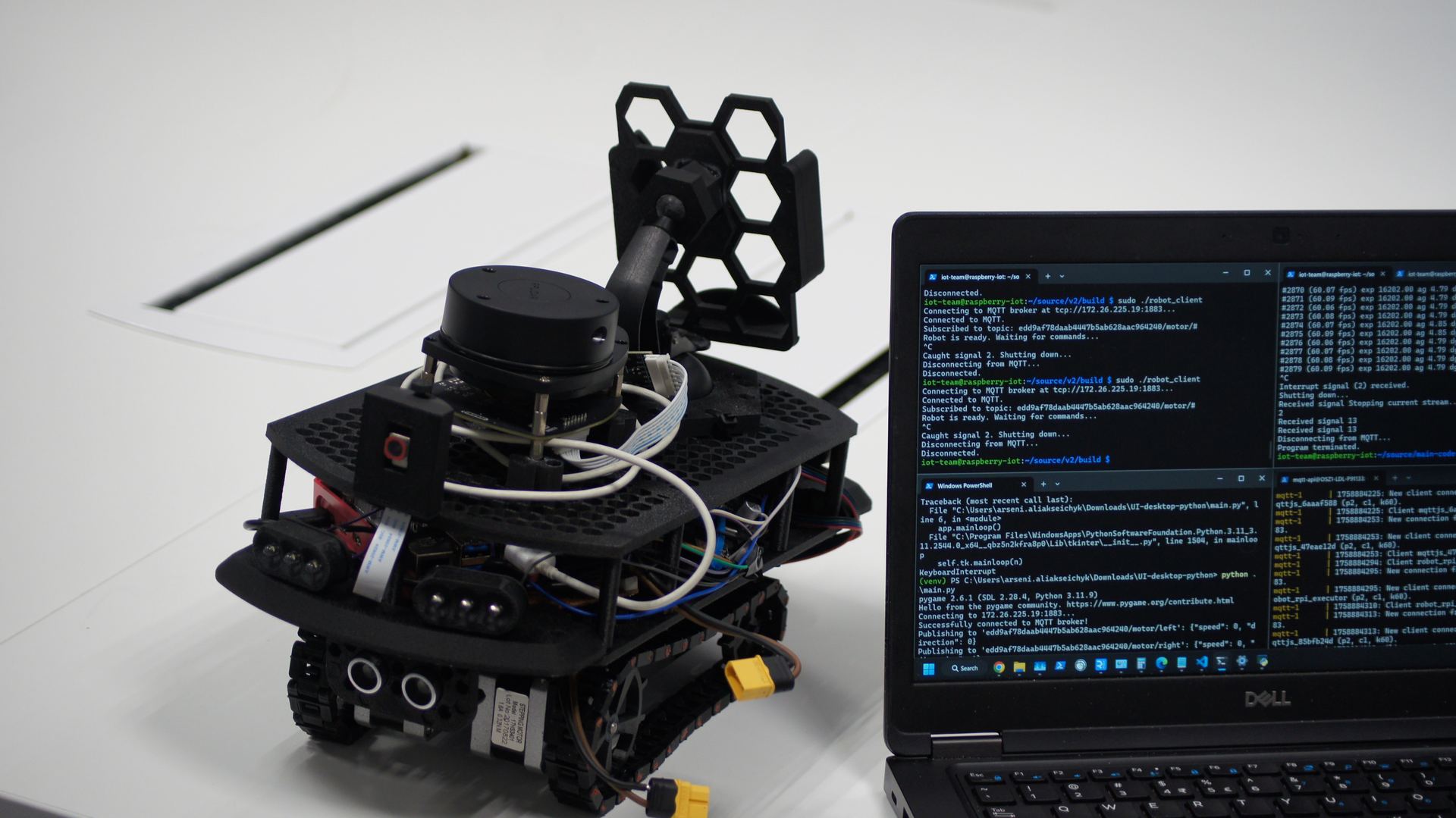



During my internship at GlobalLogic Poland (Koszalin), I built the core embedded software for a modular robotic platform on Raspberry Pi 5 - a C++17 multithreaded architecture where 5 concurrent threads handle motor PWM control, ultrasonic sensor polling, MQTT message handling, the GStreamer video pipeline, and a REST API server. I also set up the deployment infrastructure (Docker Compose on a self-managed Linux server, Bash automation), then supported the team across the rest of the platform - all within an Agile/SCRUM environment (Jira).
Key Features
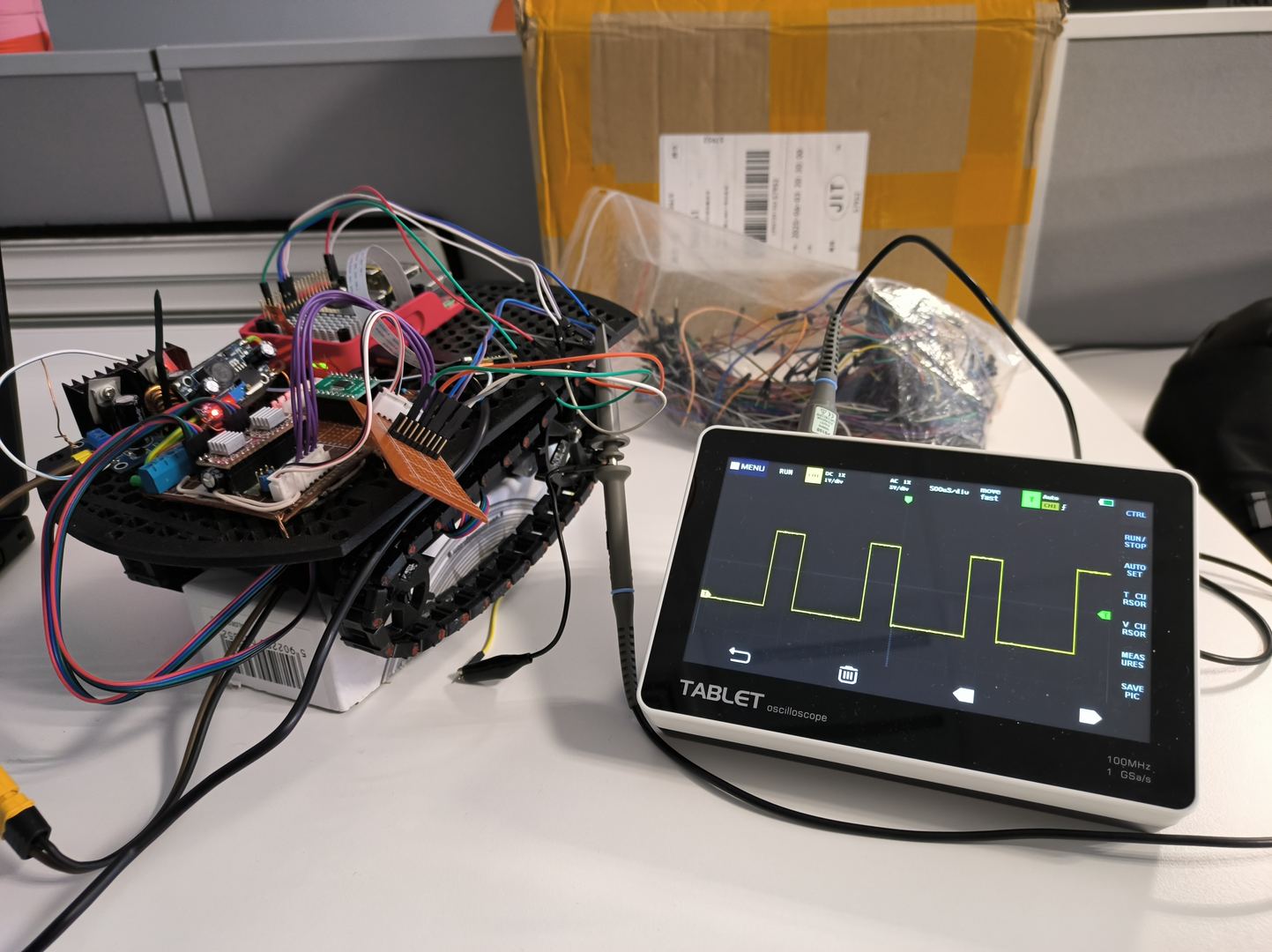
- C++17 multithreaded motion control (5 concurrent threads: motor PWM, sensor polling, MQTT listener, video pipeline, API server)
- Real-time FPV video streaming via GStreamer (MJPEG over UDP, up to 1080p@60fps)
- Ultrasonic obstacle detection (HC-SR04) with 20 cm threshold and hysteresis logic for noise rejection
- REST API server for remote robot control
- Docker Compose deployment (Mosquitto MQTT broker + Redis) on a self-managed Linux server
- Hailo AI neural processor integration for real-time human skeleton detection (team-supported)