Arseni Aliakseichyk
Embedded and Infrastructure Engineer
CyberGlove - IoT Smart Glove Platform
ESP32 Wearable for Gesture Control
Personal • 2025 – Present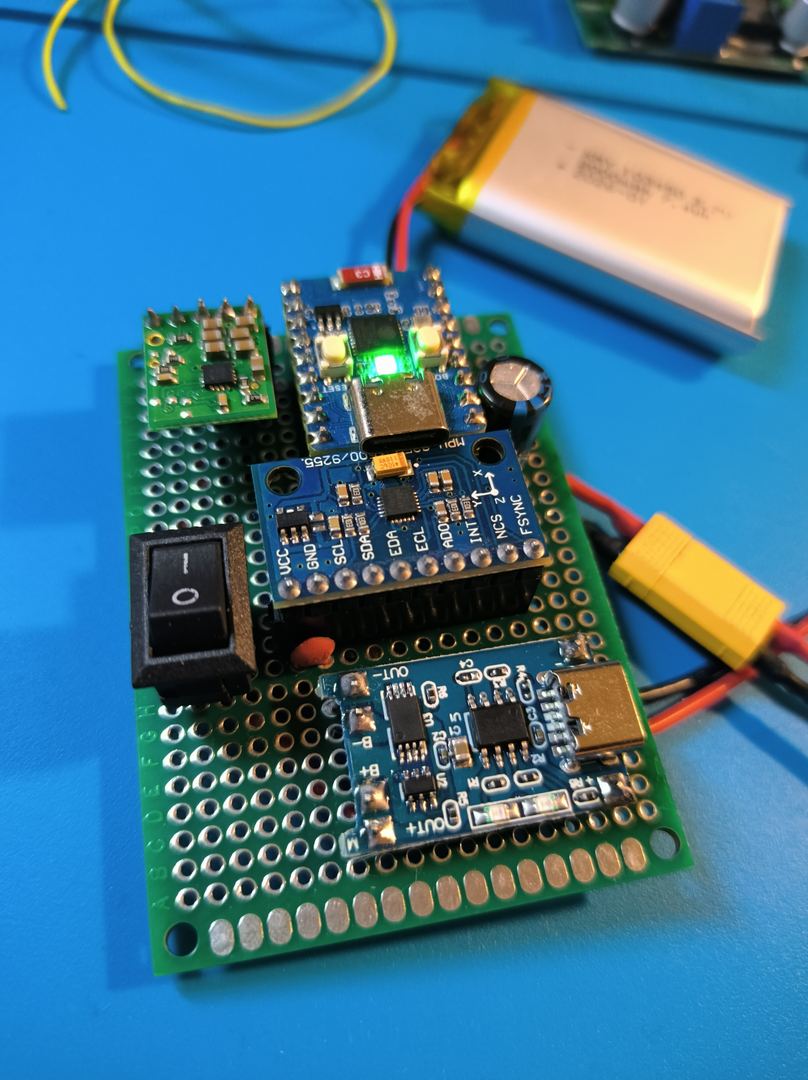
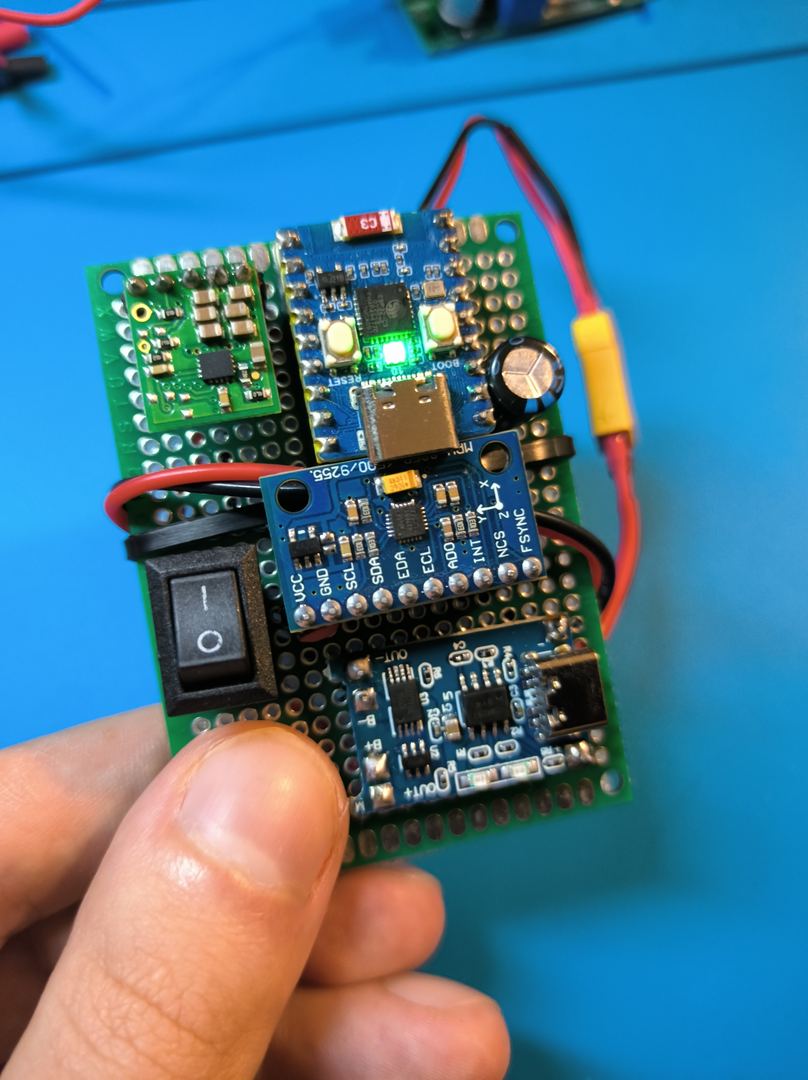
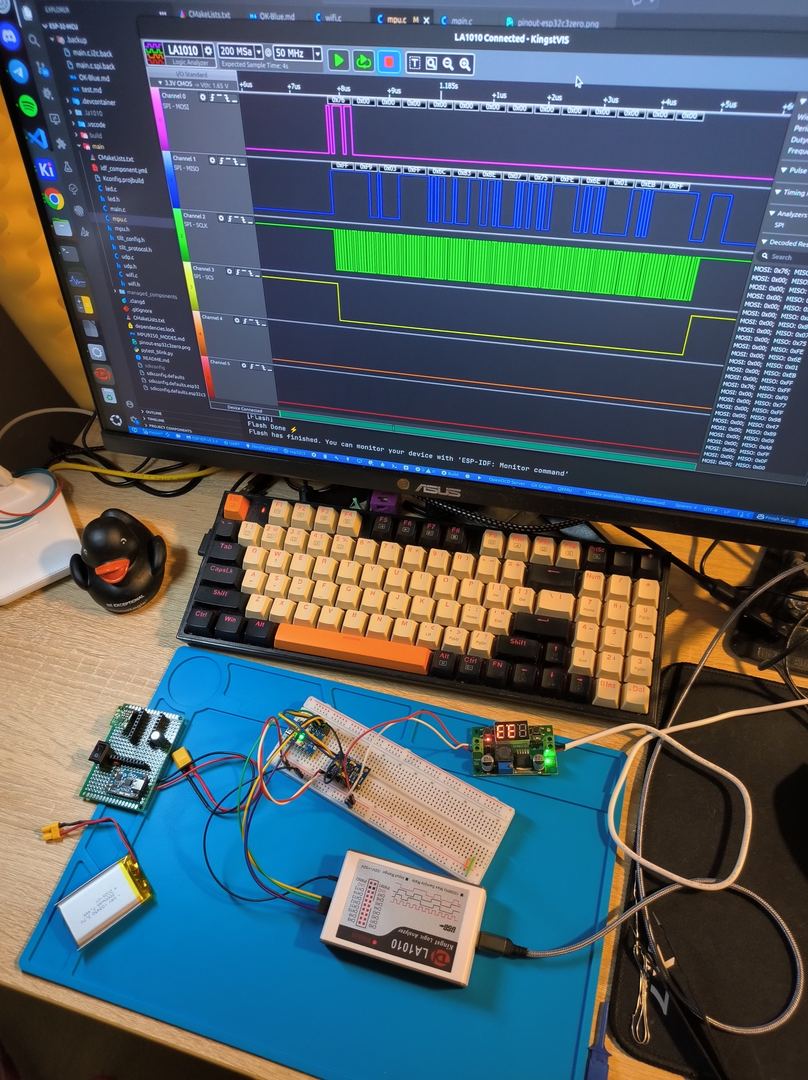
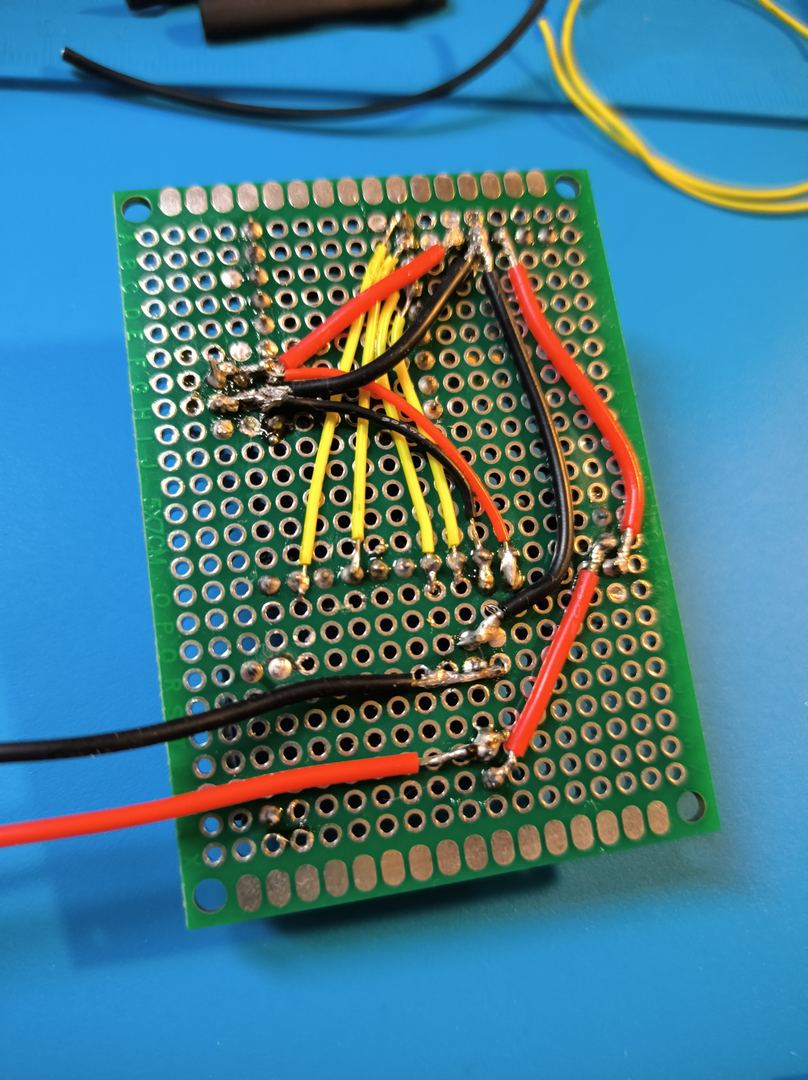
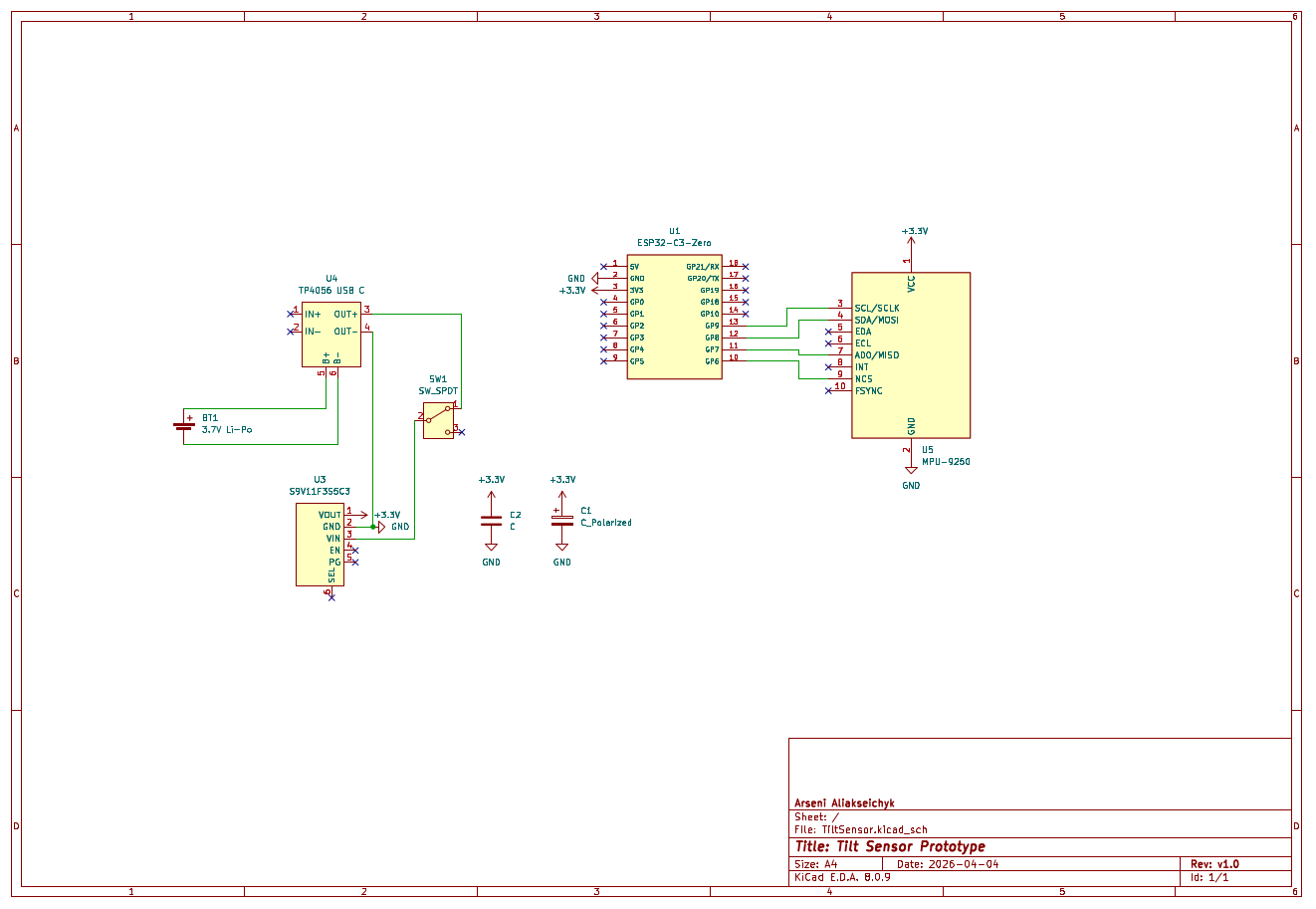
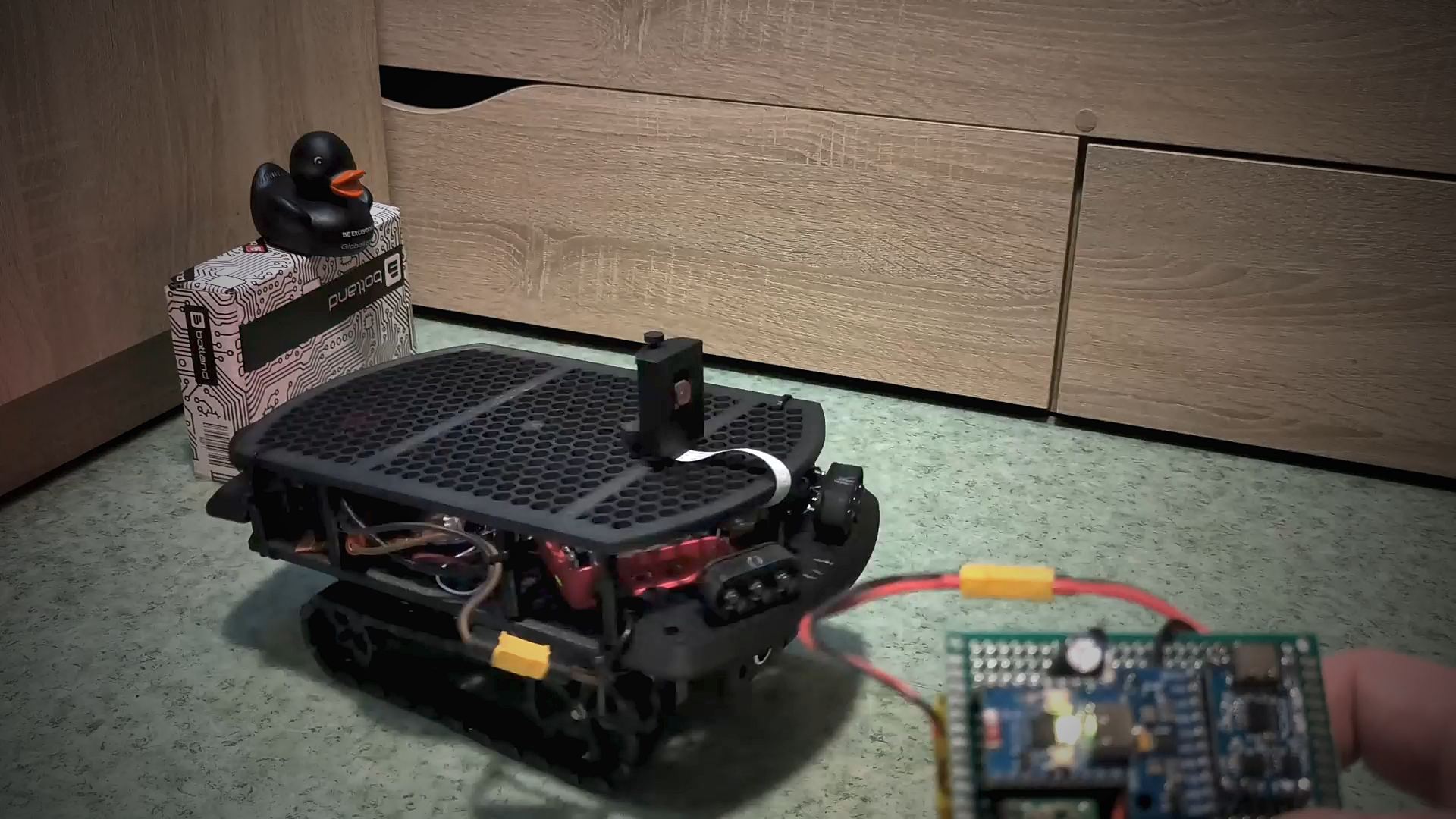
CyberGlove is my flagship personal project - an IoT smart glove for real-time gesture recognition and control, in active development. Phase 1 (complete): firmware on ESP32 (C, ESP-IDF, FreeRTOS) with MPU-6050 (photo) → MPU-9250 → ICM-20948 (on order) IMU over SPI and custom fiber optic bend sensor via 12-bit ADC, streaming sensor data at 50 Hz over WebSocket to a live web dashboard. Hardware drafted schematically in KiCad 8 Schematic Editor, with perfboard layout planned in KiCad PCB Editor to keep hand-soldering clean and trace routing deliberate. Assembled on perfboard with hand-soldered SMD and through-hole components for comfortable iteration: ESP32-C3-Zero + IMU sensor node + full LiPo power chain (TP4056 USB-C charger → S9V11F3S5C3 buck-boost 3.3V regulator + SPDT power switch). KiCad here is used as a drafting and layout-planning tool - full multilayer PCB fabrication is an experiment I’m still exploring. The Phase 1 sensor node was validated in a real application - integrated into the robot platform as an IMU-based tilt controller, proving the hardware and firmware stack before moving to Phase 2. Phase 2 (in progress): adding fiber optic bend sensors on all five fingers via ADC for full finger curl detection, combined with IMU orientation - enabling full gesture recognition with planned TinyML inference on-device.
Key Features - Phase 1 (complete)
- MPU-9250 9-DoF IMU over SPI (accelerometer + gyroscope + magnetometer)
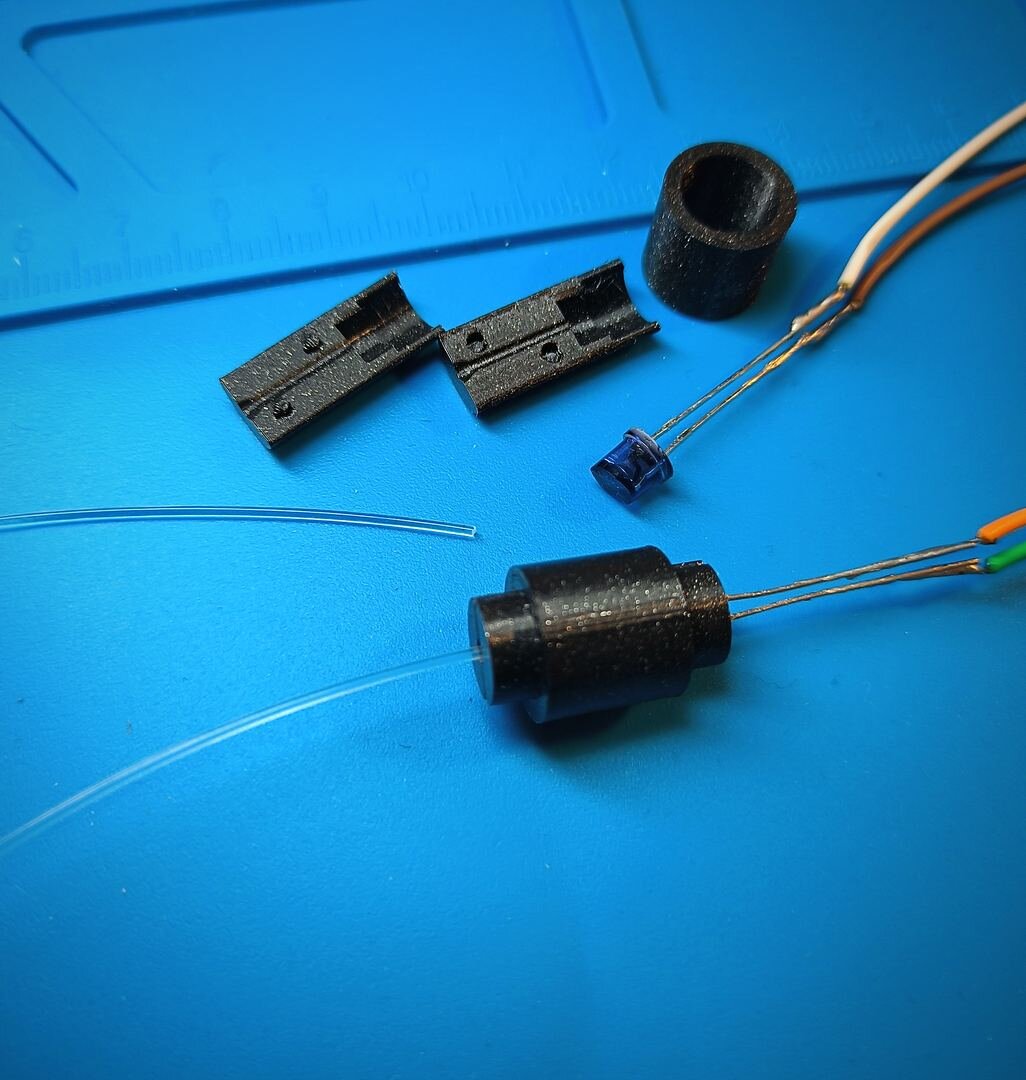
- Custom fiber optic bend sensor via ADC oneshot driver (12-bit resolution)
- Real-time WebSocket telemetry at 50 Hz (JSON sensor data)
- Schematic + perfboard layout in KiCad 8 (Schematic + PCB Editor), assembled on perfboard: ESP32-C3-Zero + MPU-9250 + LiPo power chain
- LiPo power management: TP4056 USB-C charger + S9V11F3S5C3 buck-boost 3.3V
- Wi-Fi STA mode with event-driven automatic reconnection
- FreeRTOS task management for concurrent sensor reading and network I/O
- Validated on robot platform as IMU tilt controller (UDP → Raspberry Pi)
Phase 2 (in progress) Update May 2026
- Fiber optic bend sensors on 5 fingers via ADC
- Self-designed OpenSCAD 3D-printed optical fixture: split-clamshell housing aligning IR emitter LED, plastic optical fiber, and phototransistor with zero play for repeatable bend-sensor readings (printed in-house)
- Full gesture recognition combining finger curl + IMU orientation
- Planned TinyML on-device inference for custom gesture classification